Salidas de OpenDroneMap
A continuación se enumeran algunos de los resultados útiles que produce ODM.
Nube de puntos
odm_georeferencing/odm_georeferenced_model.ply/laz/csv – La nube de puntos georeferenciada en diferentes formatos de archivo

Nube de puntos sobre la Universidad Estatal Zanzibar, cortesía de Khadija Abdullah Ali
Modelo texturizado 3D
odm_texturing/odm_textured_model.obj – La malla de superficie texturizada odm_texturing/odm_textured_model_geo.obj – La malla de superficie texturizada y georeferenciada
You can access the point cloud and textured meshes using MeshLab. Open MeshLab, and choose File:Import Mesh and choose your textured mesh from a location similar to the following: odm_texturing\odm_textured_model.obj
Malla texturizada cortesia de OpenDroneMap
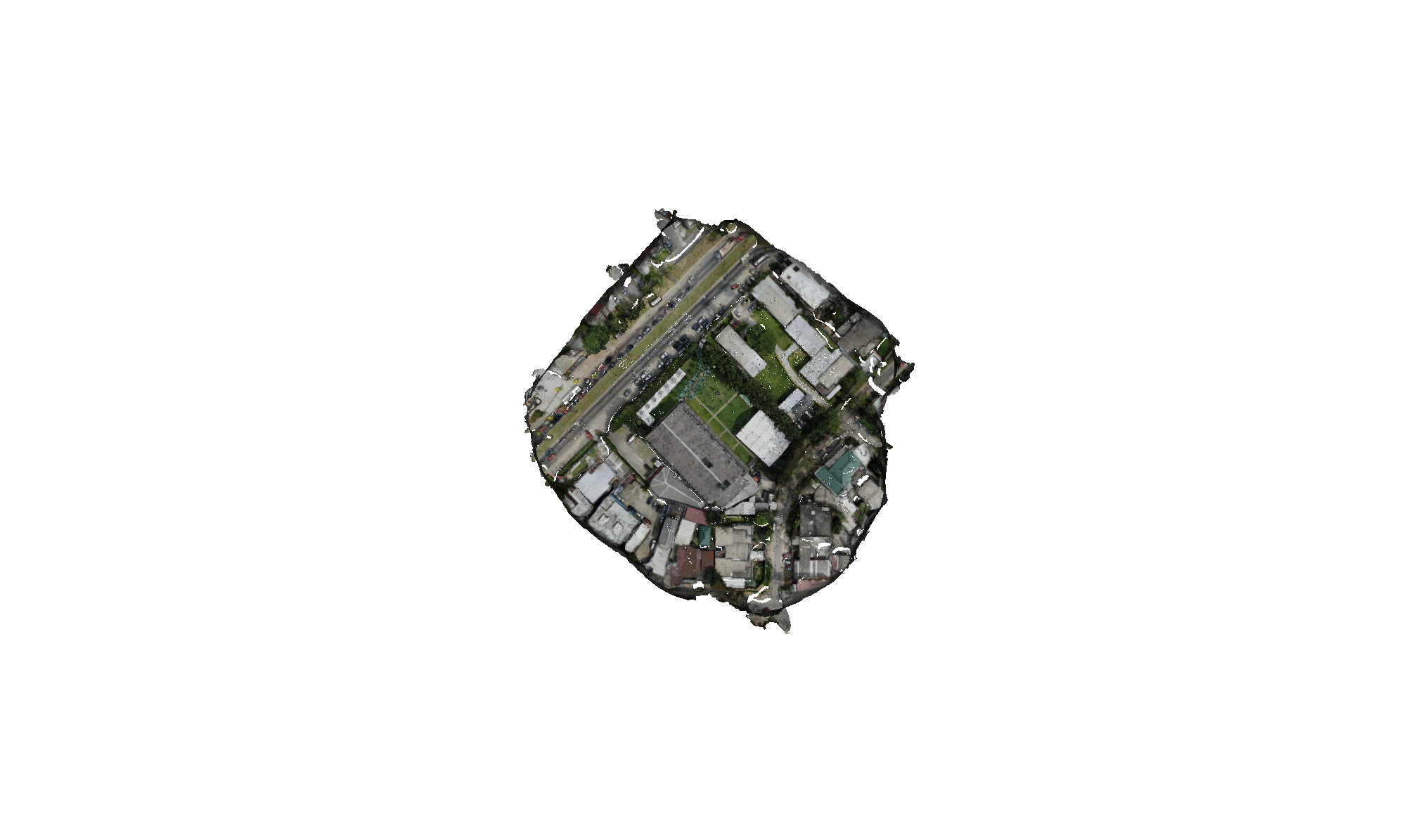
Ortofoto
odm_orthophoto/odm_orthophoto.tif – Ortofoto GeoTIFF. Puede usarla en QGIS como una capa raster.
odm_orthophoto/odm_orthphoto.original.tif – The orthophoto in its original un-cropped state.

Ortofoto sobre la Universidad Estatal de Zanzibar, cortesía de Khadija Abdullah Ali
DTM/DSM
DTM/DSM will only be created if the --dtm or --dsm options are used. See tutorial on elevation models for more options in creating.
Los datos se almacenarán en:
odm_dem/dtm.tif
odm_dem/dsm.tif
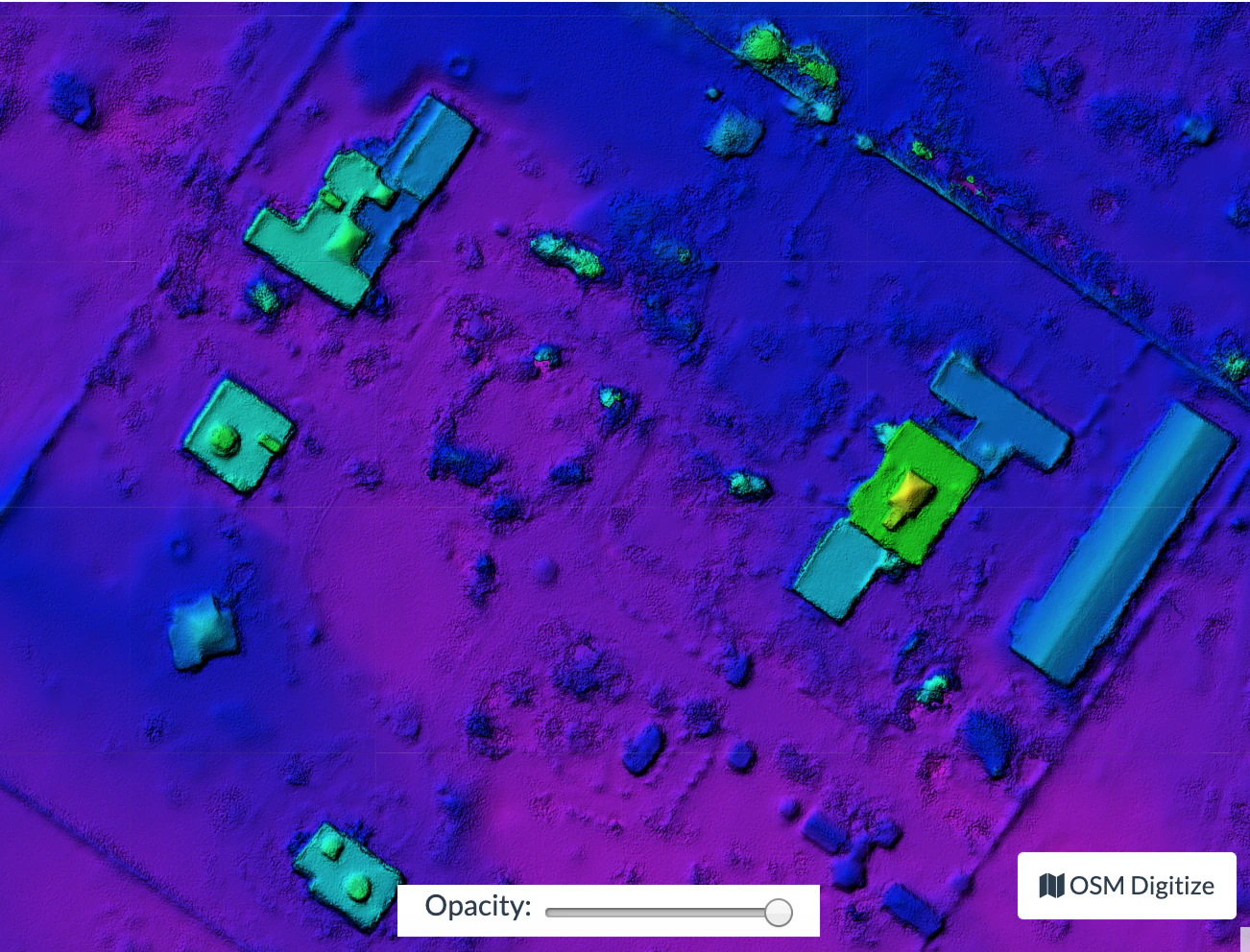
Modelo digital de superficie sobre la Universidad Estatal de Zanzibar, cortesía de Khadija Abdullah Ali
Logs
Logs are output to stdout. On Linux ANSI escape color code (eg ^[[39m) is used and could be disabled by setting no_ansiesc environment variable to any value like env no_ansiesc=1
Lista de todas las salidas
project/
├── images/
│ ├── img-1234.jpg
│ └── ...
├── opensfm/ # Tie Points and camera positions here in JSON format
│ ├── config.yaml
│ ├── images/
│ ├── masks/
│ ├── gcp_list.txt
│ ├── metadata/
│ ├── features/
│ ├── matches/
│ ├── tracks.csv
│ ├── reconstruction.json
│ ├── reconstruction.meshed.json
│ ├── undistorted/
│ ├── undistorted_tracks.json
│ ├── undistorted_reconstruction.json
│ └── depthmaps/
│ └── merged.ply # Dense Point Cloud
├── odm_meshing/
│ ├── odm_mesh.ply # A 3D mesh
│ └── odm_meshing_log.txt # Output of the meshing task. May point out errors.
├── odm_texturing/
│ ├── odm_textured_model.obj # Textured mesh
│ ├── odm_textured_model_geo.obj # Georeferenced textured mesh
│ └── texture_N.jpg # Associated textured images used by the model
├── odm_georeferencing/
│ ├── odm_georeferenced_model.ply # A georeferenced dense point cloud
│ ├── odm_georeferenced_model.laz # LAZ format point cloud
│ ├── odm_georeferenced_model.csv # XYZ format point cloud
│ ├── odm_georeferencing_log.txt # Georeferencing log
│ └── odm_georeferencing_utm_log.txt # Log for the extract_utm portion
├── odm_orthophoto/
│ ├── odm_orthophoto.webp # Orthophoto image (no coordinates)
│ ├── odm_orthophoto.tif # Orthophoto GeoTiff
│ ├── odm_orthophoto_log.txt # Log file
│ └── gdal_translate_log.txt # Log for georeferencing the png file
└── odm_dem/
├── dsm.tif # Digital Surface Model Geotiff - the tops of everything
└── dtm.tif # Digital Terrain Model Geotiff - the ground.
Aprende a editar y ayuda a mejorar esta página!